Il nostro rover è una macchina modulare progettata per affrontare ogni sfida. Con un telaio in alluminio leggero e resistente, sospensioni indipendenti e componenti stampati in 3D con materiali avanzati, combina versatilità e performance.
Dotato di un braccio robotico con toolchanger autonomo, un carotatore basculante compatto e una Science Box per l’analisi dei campioni, è pronto per terreni estremi e missioni complesse.
TELAIO
Il telaio di Sirio è stato concepito per garantire una resistenza strutturale ottimale e un volume massimo, combinando queste caratteristiche con un peso ridotto ed un’elevata modularità.
Quest’ultima, in particolare, appresenta un elemento cruciale per una piattaforma in continua evoluzione, progettata per essere adattata e reinventata con rapidità ed efficienza.
SOSPENSIONI
Le sospensioni del rover sono ad angolo fisso e indipendenti, con le due bancate laterali connesse da una barra differenziale per garantire stabilità e adattabilità ai terreni irregolari. Ai capi delle sospensioni sono montate quattro ruote sterzanti, che offrono un’eccellente manovrabilità. La struttura è realizzata combinando PA12 tramite tecnologia SLS e fibra di carbonio, unendo leggerezza, robustezza e resistenza ottimale alle sollecitazioni meccaniche.
STERZO E RUOTA
Le ruote del Rover sono studiate per minimizzare peso e ingombro, garantendo al contempo un grip ottimale su diverse tipologie di terreni, così da mantenere sempre l’aderenza in qualsiasi condizione operativa.
Realizzate in TPU Shore 95 con configurazione airless, sfruttano la deformabilità del materiale per assorbire urti e vibrazioni, eliminando il rischio di forature anche su superfici irregolari o con oggetti appuntiti. Il battistrada, dotato di tacchetti a spessore variabile, assicura una trazione eccellente, mentre la capacità della ruota di adattarsi agli ostacoli facilita il superamento di terreni accidentati.
BRACCIO ROBOTICO
Il braccio robotico di Sirio è stato progettato tenendo conto di requisiti specifici quali un payload di 3 kg, un peso complessivo inferiore a 10 kg e un volume operativo ampio, grazie a un’estensione massima superiore a 1,20 metri. Dotato di 6 gradi di libertà, il braccio è stato sviluppato per garantire flessibilità e precisione, consentendo al sistema di raggiungere qualsiasi configurazione desiderata con efficienza e affidabilità
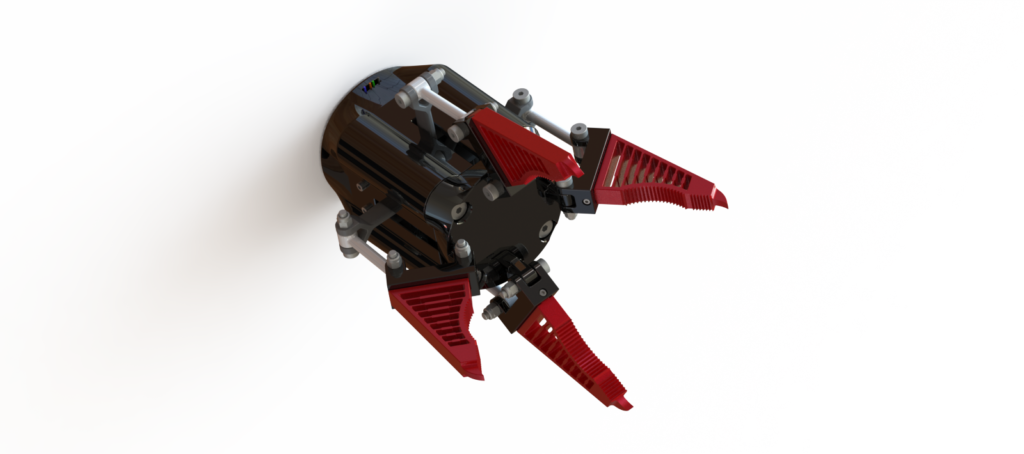
END – EFFECTOR
Gli End-Effector di Sirio sono stati progettati per rispondere alle principali mansioni del braccio robotico: manipolazione di un pannello elettrico, raccolta di campioni di terreno, sabbia e roccia, e manipolazione di blocchi per la costruzione di un muro. Grazie al sistema toolchanger integrato, non è stato necessario limitarsi a un singolo end effector versatile ma poco performante; al contrario, sono stati sviluppati quattro end effector specifici, ciascuno eccellente nel soddisfare i requisiti delle diverse missioni. Questa specializzazione consente di affrontare ogni compito con precisione, efficienza e senza compromessi, mantenendo comunque un design complessivo caratterizzato da pesi e ingombri ottimizzati.
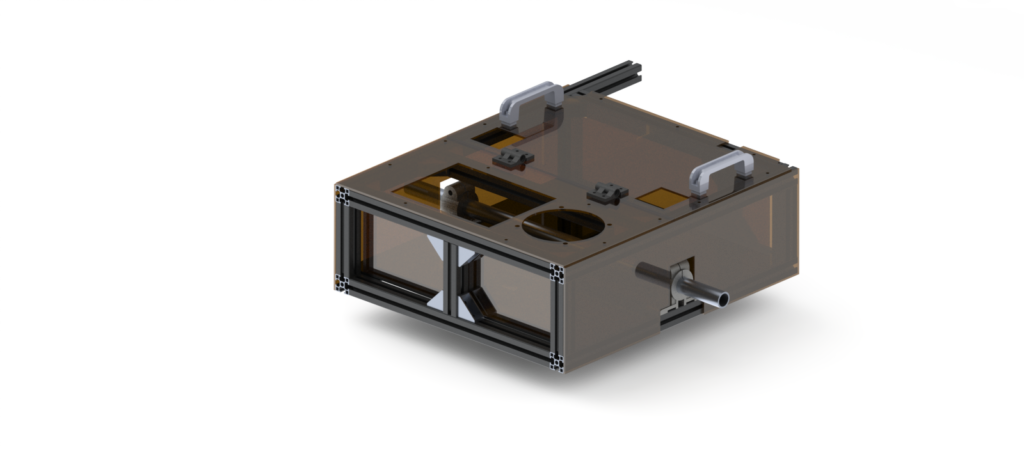
CAROTATORE
Il carotatore di Sirio utilizza una punta elicoidale rotante montata su un carrello verticale per prelevare campioni fino a 30 cm di profondità.
La sua struttura flottante si ripiega orizzontalmente in posizione di riposo, riducendo ingombri e abbassando il baricentro, e si dispone perpendicolare al terreno durante l’uso.
I campioni raccolti vengono depositati in un cassetto per essere pesati, catalogati e analizzati, preservando i vari strati di terreno.