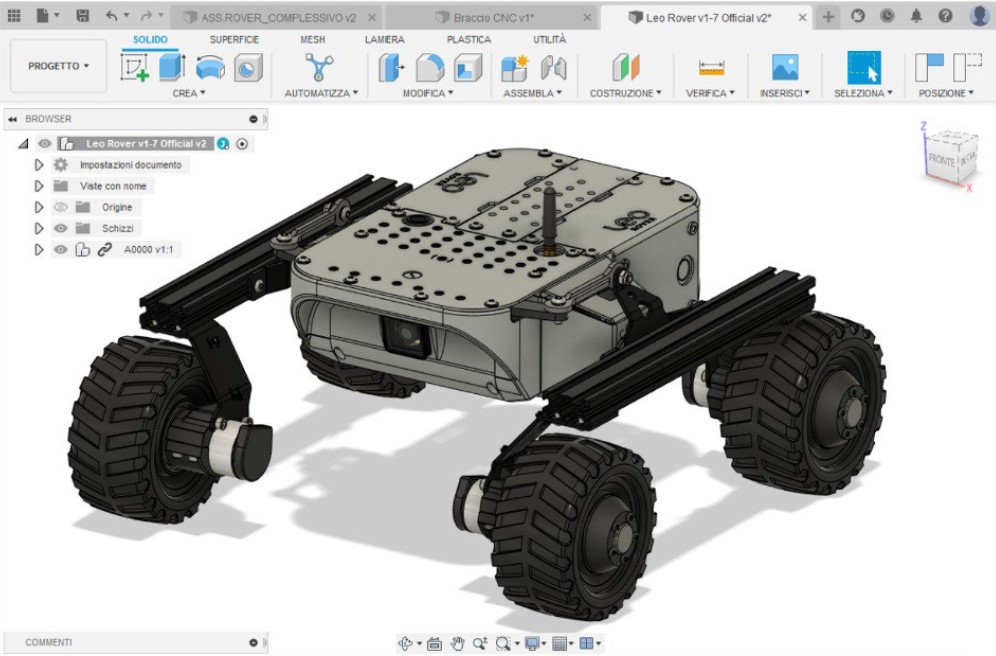
Il Leo Rover è una piattaforma robotica mobile open-source sviluppata dall’azienda polacca Kell ideas.
All’European Rover Challenge i team che competono alla formula Remote devono sviluppare il miglior software di controllo possibile con l’obbiettivo di riuscire a completare le varie task e collezionare più punti possibili.
Testare il software realizzato è, quindi, fondamentale. Per questo motivo i team possono acquistare un modello di Leo Rover, identico a quello utilizzato in gara, e provare nel “mondo reale” se il codice sviluppato sia corretto e capace di superare al meglio le varie prove.
Per motivi di budget, si è preferito optare per lo sviluppo interno di un rover complementare, con medesime dimensioni, forme e caratteristiche e quasi completamente stampato in 3D.
Alcune parti del nostro Leo Rover sono state quindi adattate e riprogettate, per sopperire alle diverse proprietà strutturali tra il PLA e le lamiere in alluminio di cui il modello “originale” fa largo uso. Le modifiche più sostanziali apportate al rover riguardano tutte le componenti elettroniche di controllo del rover, le ruote e i motori di trazione.