
Clicca o passa sulle parti del rover che ti interessano per scoprire di più.
Luce
______
RED-1 sarà dotato di una torretta LED di segnalazione, questa avrà funzione di indicatore di azione e permetterà agli operatori di conoscere lo stato di funzionamento del Rover, in modo da poter operare in sicurezza in prossimità di questo.
Carotatore
______
Il carotatore ha la funzione di perforare il terreno e recuperare campioni in profondità, il sistema è studiato in modo da ottimizzare la potenza ed i tempi richiesti, oltre a ciò si è studiato un metodo che permettesse di mantenere evidenti i vari layer di terreno.
Braccio Robotico
______
Il braccio robotico di RED-1 è stato selezionato a partire da informazioni quali pay-load, volume operativo, peso, cercando di individuare la soluzione migliore che permettesse al sistema di raggiungere ogni configurazione desiderata.
End-Effector
______
L'End-Effector è stato progettato per permettere il recupero di campioni superficiali di terreno, la manipolazione di interruttori e manopole, il tutto con un controllo semplice e pesi ed ingombri ridotti.
Contenitore Provette
______
Il contenitore per provette è un sistema che ha lo scopo di stoccare al proprio interno le provette della Science-Task/Probing Task, è studiato per permettere un agevole inserimento di queste ed un altrettanto semplice prelievo. Risulta inoltre dotato di un sistema di ancoraggio a telaio molto semplice e rapido.
Rocker-Bogie
______
Il Rocker-Bogie è una particolare tipologia di sospensioni che permette al Rover di oltrepassare ostacoli di altezza superiore al doppio del diametro della ruota.
La presenza di una differential bar inoltre fa si che il sistema, nel momento in cui questo stia oltrepassando un ostacolo, risulti più saldo e riduca il rischio di ribaltamento laterale o lo slittamento delle ruote.
Telaio
______
Il telaio di RED-1 è stato progettato per garantire la massima resistenza strutturale e il massimo volume, ma al contempo un peso ridotto e modularità, questa in particolare risulta essere una proprietà fondamentale per una piattaforma in continua evoluzione e che deve poter essere modificata e reinventata rapidamente e con semplicità.
Ruote
______
Le ruote del Rover sono studiate per minimizzare fattori come peso ed ingombro, ma al contempo garantire un perfetto grip su diverse tipologie di terreni, in modo da permettere al Rover di non perdere aderenza in qualsiasi condizione operativa.
Ruote
______
Le ruote del Rover sono studiate per minimizzare fattori come peso ed ingombro, ma al contempo garantire un perfetto grip su diverse tipologie di terreni, in modo da permettere al Rover di non perdere aderenza in qualsiasi condizione operativa.
Ruote
______
Le ruote del Rover sono studiate per minimizzare fattori come peso ed ingombro, ma al contempo garantire un perfetto grip su diverse tipologie di terreni, in modo da permettere al Rover di non perdere aderenza in qualsiasi condizione operativa.
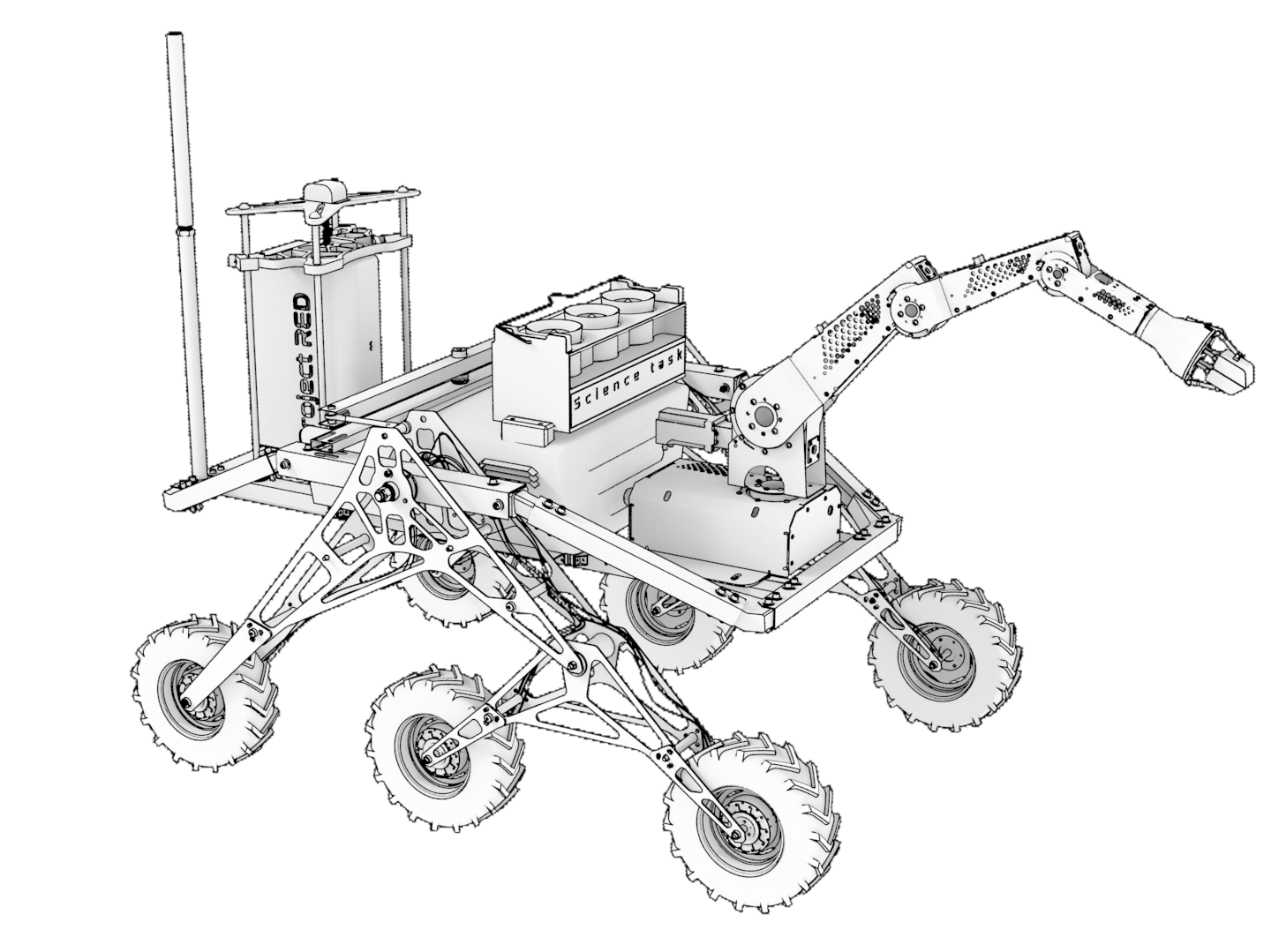
Il telaio
Il telaio è la struttura portante del rover ed ha una struttura ibrida metallo-polimero. La sua funzione è quella di sostenere tutti gli elementi ausiliari del rover: il braccio robotico, il carotatore, il porta provette e il case dell’elettronica.
Tesi di Antonio Anastasi: “Progettazione di un telaio ibrido metallo-polimero per rover ERC”
I suoi angoli e la sua struttura, insieme al “differential bar”, lo rendono fluttuante e auto bilanciante, permettendogli di stabilizzare meccanicamente tutti i pesi montati su di esso.






Sospensione Rocker-Bogie
Il rover è dotato di una sospensione ad elementi rigidi rocker bogie. Il rocker, montato sul telaio, si connette ad una bogie folle che mantiene il contatto al suolo attraverso due delle tre ruote afferenti ad ognuna delle due bancate. Al fine di mantenere il telaio in equilibrio rispetto al suolo, si introduce il “differential bar”, meccanismo differenziale che va ad equilibrare i momenti ribaltanti rispetto al centro di massa e va a generare un meccanismo di basculamento opposto tra le bancate durante il moto e durante il superamento degli ostacoli.
Tesi di Antonio Vario: “Sviluppo e progettazione di una sospensione ad elementi rigidi rocker-bogie”
Differential bar
Elemento fondamentale del telaio e della sospensione permette al rover di stabilizzare meccanicamente tutti i pesi disposti sul telaio e di superare ostacoli fino a 30 cm di altezza, trasmettendo tutti gli sforzi e le tensioni da una bancata del rover all’altra.
Gruppo ruota
Il gruppo ruota rappresenta l’elemento terminale della sospensione rocker bogie e attraverso un sistema di trasmissione a cinghia, azionato da 4 motori-riduttori epicicloidali, assicura la movimentazione del rover. Sono presenti 4 gruppi ruota motrici e 2 gruppi ruota trascinati centrali.
Braccio robotico
Il braccio robotico montato sul rover possiede 6 gradi di libertà e attraverso l’azionamento dei suoi giunti permette al rover di completare diverse task: come il controllo di un pannello elettrico, l’azionamento di diversi tipi di pulsanti, l’inserimento e la raccolta di provette contenenti campioni geologici di terreno. Fornisce il supporto per la telecamera durante le scansioni della guida autonoma per la Navigation Task e durante la raccolta immagini e video della Science Task.




End-effector elettro-meccanico
Si tratta della parte terminale del braccio robotico e permette con le sue pinze l’attuazione di pulsanti e leve durante la maintenance task e il posizionamento/raccolta di provette contenenti campioni geologici di terreno durante la Probing task.
Tesi di Massimiliano Cadei: “Sviluppo e progettazione di un end-effector elettro-meccanico”
Case elettronica
Il cassone dell’elettronica rappresenta lo scompartimento in cui andare a inserire e proteggere tutti i cablaggi e i componenti elettronici necessari al controllo del braccio robotico, alla movimentazione del rover e di tutte le telecamere, sensori e antenne.
Sistema di emergenza
Il sistema di emergenza assicura la sicurezza del rover nei movimenti compiuti durante ogni task permettendo lo spegnimento di tutto il sistema e di tutte le comunicazioni con il semplice azionamento di un pulsante.